- 2018 – The Low-altitude UAV communication and tracking (LUCAT) project funded by INDNOR programme jointly by the Norwegian research council (NFR) and the Department of Science and Technology (DST), Project Manager and PI: Professor Linga Reddy Cenkeramaddi, ACPS Research Group, Department of ICT, UiA Grimstad, Project duration: 2019-2024.
**************************************************************************************************************
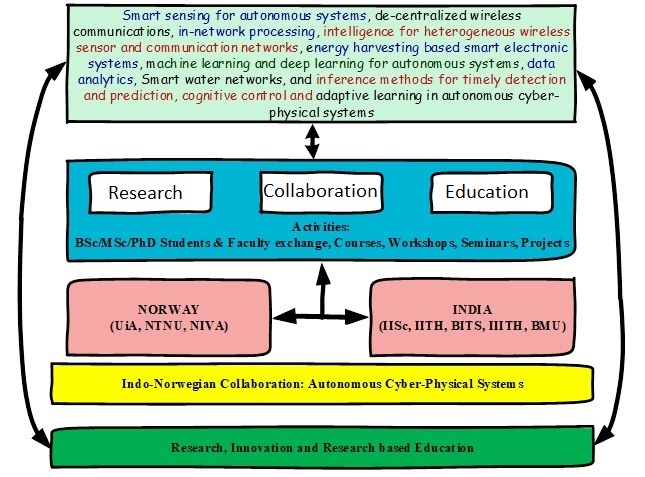
The LUCAT project aims to develop advanced and robust algorithms to detect and accurately trace rapidly moving UAVs, popularly called drones. The research takes place at the University of Agder’s ACPS Research Group, Department of Computational and Data Sciences (CDS), IISc Bangalore, India, the Robert Bosch Centre for Cyber-Physical Systems, IISc Bangalore, India, and the Department of Electrical Engineering, Indian Institute of Technology, Hyderabad, India. This is the only project where the prestigious Indian University IISc collaborates with a Norwegian university in relation to the areas of signal processing, communication technology, and machine learning.
Full project name: Low-altitude UAV Communication and Tracking (LUCAT)
Funding: Researcher Project, IKTPLUSS INDNOR Program, Research Council of Norway
Principal Managers: Prof. Linga Reddy Cenkeramaddi, Prof. Abhinav Kumar
and Prof. Phaneendra K. Yalavarthy.
Topic: The LUCAT project funded by IKTPLUSS-INDNOR (Joint Indo-Norwegian researcher projects within Information and Communication Technology) develops the technology for both communication and precise tracking of both manned and unmanned aerial vehicles operating in low-altitude corridors. The Autonomous and Cyber-Physical Systems (ACPS) research group at the University of Agder, Campus Grimstad, Norway in collaboration with the Department of Electrical Engineering at the Indian Institute of Technology, Hyderabad, India, and the Department of Computational and Data Science and Robert Bosch Centre for cyber-physical systems at the Indian Institute of Science, Bangalore, India, will jointly design, develop and implement the proposed technology. This project aims to detect and precisely track multiple rapidly moving unmanned aerial vehicles using smart radar sensors, as well as novel signal processing and wireless communication algorithms. New methods will be developed also to classify the objects in the flight corridors and the communication modules located within the unmanned aerial vehicles will be advanced software-defined radio modules with the ability to sense on-the-fly the radio-frequency environment, leading to the discovery of opportunities for communications (what is called spectrum cognizant communications). The tasks of tracking and communication will be cooperating and enhancing each other, improving substantially the performance of tracking and classification, as compared to the currently existing solutions.
Participant Institutions: ACPS-UiA, IISc Bangalore, IIT Hyderabad
Period: 2018 – 2024
Project details: In the near future, a large number of unmanned aerial vehicles, also known as drones, will pervade populated areas’ skies, serving millions of people worldwide for goods transportation, construction, agriculture, medical, surveillance, search-and-rescue operations, and a variety of other applications. Daily tasks such as food or packet delivery, grocery shopping, and surveillance, among others, will be carried out by autonomous UAVs in densely populated areas, resulting in profound changes in day-to-day human life. The LUCAT project, funded by IKTPLUSS-INDNOR (Joint Indo-Norwegian researcher projects in Information and Communication Technology by NFR and DST), is working to develop technology for accurate sensing, precise tracking, and communication of both manned and unmanned aerial vehicles operating in low-altitude corridors. We, the Autonomous and Cyber-Physical Systems Research Group at the University of Agder, Campus Grimstad, Norway, will design, develop, and implement the proposed technology in collaboration with the Department of Electrical Engineering, Indian Institute of Technology, Hyderabad, India, and the Department of Computational and Data Sciences, & the Robert Bosch Centre for Cyber-Physical Systems Indian Institute of Sciences, Bangalore, India. Using mmWave radar sensors and other sensors, as well as novel signal processing and machine learning models, and wireless communication algorithms, this project aims to sense/detect and precisely track multiple rapidly moving unmanned aerial vehicles. New methods will also be developed to classify objects in flight corridors, and communication modules located within unmanned aerial vehicles will include advanced software-defined radio modules with the ability to sense the radio-frequency environment on-the-fly, leading to the discovery of communications opportunities (what is called spectrum cognizant communications). Sensing, tracking, and communication tasks will collaborate and enhance each other, significantly improving sensing, tracking, and classification performance when compared to currently available solutions for low-altitude traffic management systems. New techniques for the detection, localization, and classification of UAVs are developed using ground station mmWave radars. Hybrid communication schemes are explored for UAV-UAV and UAV-Ground station communications.
**************************************************************************************************************