Wilson A N, Abhinav Kumar, Ajit Jha, and Linga Reddy Cenkeramaddi, “Multi-target Angle of Arrival Estimation using Rotating mmWave FMCW Radar and Yolov3,” has been accepted for publication in the IEEE Sensors Journal (2022).
Abstract: It is still challenging to accurately localize unmanned aerial vehicles (UAVs) from a ground control station (GCS) using various sensors. The mmWave frequency-modulated continuous wave (FMCW) radars offer excellent performance for target detection and localization in harsh environments and low lighting conditions. However, the estimated angle of arrival (AoA) of targets in the captured scene is quite poor. This article focuses on improving AoA estimation by combining the cutting-edge machine learning (ML) algorithms with a mechanical radar rotor setup. An mmWave FMCW radar system is mounted on a programmable rotor to capture range–angle maps of targets at various locations. The range–angle images are then labeled and trained further with the Yolov3 algorithm. Subsequent testing reveals that for detected target objects, the centroid of the bounding boxes from the detected objects provides accurate AoA estimation with very low root mean square error (RMSE). The results show that the proposed approach outperforms traditional methods in terms of performance and estimation accuracy.
Kumuda D K, Vandana G S, Bethi Pardhasaradhi, B S Raghavendra, Pathipati Srihari, and Linga Reddy Cenkeramaddi, “Multi Target Detection and Tracking by Mitigating Spot Jammer Attack in 77GHz mm-Wave Radars: An Experimental Evaluation,” has been accepted for publication in IEEE Sensors Journal 2022.
Abstract: Small form factor radar sensors at millimeter wavelengths find numerous applications in the industrial and automotive sectors. These radar sensors provide improved range resolution, good angular resolution, and enhanced Doppler resolution for short range and ultrashort ranges. However, it is challenging to detect and track the targets accurately when a radar is interfered by another radar. This article proposes an experimental evaluation of a 77-GHz IWR1642 radar sensor in the presence of a second 77-GHz AWR1642 radar sensor acting as a spot jammer. A real-time experiment is carried out by considering five different targets of various cross sections, such as a car, a larger size motorcycle, a smaller size motorcycle, a cyclist, and a pedestrian. The collected real-time data are processed by four different constant false alarm rate detectors, cell averaging (CA)-CFAR, ordered statistics (OS)-CFAR, greatest of CA (GOCA)-CFAR, and smallest of CA (SOCA)-CFAR. Following that, data from these detectors are fed into two different clustering algorithms (density-based spatial clustering of applications with noise (DBSCAN) and K-means), followed by the extended Kalman filter (EKF)-based tracker with global nearest neighbor (GNN) data association, which provide tracks of various targets with and without the presence of a jammer. Furthermore, four different metrics [tracks reported (TR), track segments (TSs), false tracks (FTs), and track loss (TL)] are used to evaluate the performance of various tracks generated for two clustering algorithms with four detection schemes. The experimental results show that the DBSCAN clustering algorithm outperforms the K-means clustering algorithm for many cases.
B. Pardhasaradhi, R. R. Yakkati, and L. R. Cenkeramaddi, “Machine Learning based Screening and Measurement to Measurement Association for Navigation in GNSS Spoofing Environment,” has been accepted for publication in the IEEE Sensors Journal (2022).
Abstract: Global navigation satellite system (GNSS) provides reliable positioning across the globe. However, GNSS is vulnerable to deliberate interference problems like spoofing, which can cause fake navigation. This article proposes navigation in a GNSS spoofing environment by taking the received power, correlation distortion function, and pseudorange measurement observation space into account. In the proposed approach, both actual and interference measurements are considered a set. Machine learning screens the authentic measurements from the accessible set using parameters such as received power and correlation function distortion. To maintain the track and navigate the GNSS’s time-varying kinematics, we used a combination of the gating technique within the Kalman filter framework and logic-based track management. The machine learning classifiers like support vector machines (SVMs), neural networks (NNs), ensemble, nearest neighbor, and decision trees are explored, and we observe that linear SVM and NN provide a test accuracy of 98.20%. A time-varying position-pull off strategy is considered, and the metrics like position RMSE and track failure are compared with the conventional M-best algorithm. The results show that for four authentic measurements and spoof injections, there are only a few track failures. In contrast, even with an increase in spoof injections, track failures are zero in the case of six authentic measurements.
Khushi Gupta, Srinivas M. B., Soumya J, Om Jee Pandey, Linga Reddy Cenkeramaddi, “Automatic Contact-less Monitoring of Breathing Rate and Heart Rate utilizing the Fusion of mmWave Radar and Camera Steering System,” has been accepted for publication in the IEEE Sensors Journal (2022).
Abstract: The demand for noncontact breathing and heart rate measurement is increasing. In addition, because of the high demand for medical services and the scarcity of on-site personnel, the measurement process must be automated in unsupervised conditions with high reliability and accuracy. In this article, we propose a novel automated process for measuring breathing rate and heart rate with mmWave radar and classifying these two vital signs with machine learning. A frequency-modulated continuous-wave (FMCW) mmWave radar is integrated with a pan, tilt, and zoom (PTZ) camera to automate camera steering and direct the radar toward the person facing the camera. The obtained signals are then fed into a deep convolutional neural network to classify them into breathing and heart signals that are individually low, normal, and high in combination, yielding six classes. This classification can be used in medical diagnostics by medical personnel. The average classification accuracy obtained is 87% with precision, recall, and an F1 score of 0.93.
L. R. Cenkeramaddi, P. K. Rai, A. Dayal, J. Bhatia, A. Pandya, J. Soumya, A. Kumar, & A. Jha., “A Novel Angle Estimation for mmWave FMCW radars using Machine Learning,” IEEE Sensors Journal 2021 (in press).
Abstract: In this article, we present a novel machine learning based angle estimation and field of view (FoV) enhancement techniques for mmWave FMCW radars operating in the frequency range of 77 – 81 GHz. Field of view is enhanced in both azimuth and elevation. The Elevation FoV enhancement is achieved by keeping the orientation of antenna elements in elevation. In this orientation, radar focuses the beam in vertical direction there by enhancing the elevation FoV. An Azimuth FoV enhancement is achieved by mechanically rotating the radar horizontally, which has antenna elements in the elevation. With the proposed angle estimation technique for such rotating radars, root mean square error (RMSE) of 2.56 degrees is achieved. These proposed techniques will be highly useful for several applications in cost-effective and reliable autonomous systems such as ground station traffic monitoring and control systems for both on ground and aerial vehicles.
Sensors: Sensors are becoming more important in a variety of fields, including healthcare, smart cities, and environmental monitoring. Here are some potential research areas where the ACPS research group focuses: Internet of Things (IoT) Sensors: With the growth of IoT, sensors will become more important in collecting and transmitting data from various devices. ACPS research group focuses on developing new sensors that are more energy-efficient and can transmit data wirelessly over longer distances. Wearable Sensors: Wearable sensors have the potential to revolutionize healthcare by allowing for continuous monitoring of patients’ vital signs. ACPS research group focuses on developing sensors that are more comfortable, non-invasive, and can be integrated into clothing or jewelry. Environmental Sensors: Environmental sensors can be used to monitor air quality, water quality, and other environmental factors. ACPS research group focuses on developing sensors that are more sensitive and can detect a wider range of pollutants. Chemical Sensors: Chemical sensors can be used to detect various gases, liquids, and other chemicals. ACPS research group focuses on developing sensors that are more selective and sensitive, as well as miniaturizing sensors for use in portable devices. Imaging Sensors: Imaging sensors are used in various applications, including digital cameras, medical imaging, and security cameras. ACPS research group focuses on improving the resolution and sensitivity of sensors, as well as developing sensors that can operate in low-light conditions. Smart Sensors: Smart sensors can analyze data in real-time and make decisions based on that data. ACPS research group focuses on developing sensors that are more intelligent and can learn from their environment, as well as developing new applications for smart sensors in fields such as transportation and manufacturing.
2019 – Indo-Norwegian collaboration in Autonomous Cyber-Physical Systems (INCAPS): The Research Council of Norway (NFR) under the INTPART program; Project Manager and PI: Professor Linga Reddy Cenkeramaddi,ACPS Research Group, Department of ICT, UiA Grimstad, Project duration: 2019-2023. Partners and/or collaborators: Indian Institute of Science, Bangalore (IISc); Indian Institute of Technology, Hyderabad (IITH); International Institute of Information Technology, Hyderabad (IIITH); Birla Institute of Technology and Science, Hyderabad (BITS); Norwegian University of Science and Technology (NTNU); Norwegian Institute for Water Research (NIVA)
The INTPART (International Partnerships for Excellent Education and Research) Program, from the Research Council of Norway, funds partnerships between Norwegian higher education and research institutions and other excellent research partners in prioritized countries: Brazil, Russia, India, China, South Africa, USA, and Canada. The ACPS Group at the University of Agder was granted funding to collaborate with highly reputed Indian Universities in the field of Autonomous Cyber-physical Systems
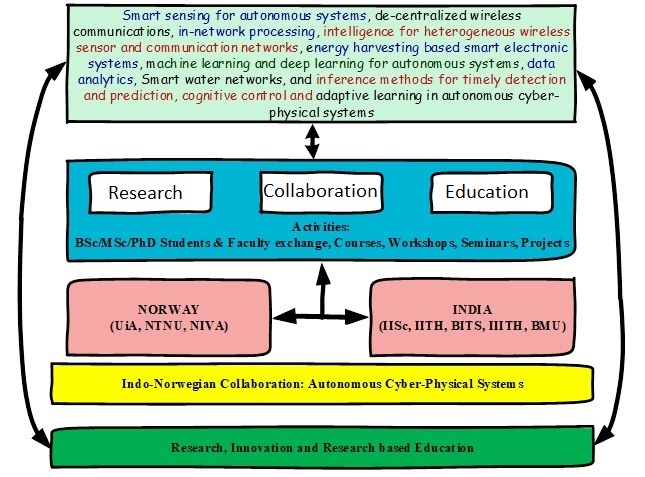
Fig. 1. Indo-Norwegian collaboration, partners, activities and main areas of expertise.
The ACPS Research Group (https://acps.uia.no/) at the University of Agder collaborates with highly reputed and top Indian Universities and leads the INTPART project Indo-Norwegian collaboration in Autonomous Cyber-Physical Systems (INCAPS), with funding of around 6 MNOK from the Research Council of Norway. This project establishes a long-term collaboration between several top-ranked Indian Universities, including the Indian Institute of Science (IISc), Bangalore, Indian Institute of Technology, Hyderabad (IITH), International Institute of Information Technology, Hyderabad (IIITH), Birla Institute of Technology and Science (BITS), Hyderabad, BML Munjal University (Through Prof. M.B.Srinivas) and several Norwegian Universities and institutes, including University of Agder (UiA), Norwegian University of Science and Technology (NTNU) and Norwegian Institute for Water Research (NIVA) in world-class research and education.
Key active participants from the University of Agder are researchers from the ACPS Group, Prof. Linga Reddy Cenkeramaddi, Prof. Ajit Jha, and Prof. Jing Zhou. Other key researchers involved in the project are Prof. Kimmo Kansanen from NTNU, Dr. Christopher Harman from NIVA, Prof. Phaneendra K. Yalavarthy from the Department of computational data sciences, Indian Institute of Science, Bangalore, Prof. Abhinav Kumar from Indian Institute of Technology, Hyderabad, Prof. Soumya J. from Birla Institute of Technology and Science, Hyderabad, Prof. M B Srinivas from Birla Institute of Technology and Science, Hyderabad (Presently at BML University, Founded by Hero Group) and Prof. Lalitha Vadlamani from the International Institute of Information Technology, Hyderabad. Søren Kragholm at UiA will participate in the administrative coordination of the INCAPS project.
Major goals are to strengthen competitiveness and innovation capacity, solve major societal challenges, and develop high-quality academic environments. This project considers broad areas of research which include smart sensing for autonomous systems, mmWave sensors-based system design, analog, digital, and mixed signal circuit design, prototyping of wireless communication systems, low-altitude UAVs tracking and communications, de-centralized wireless communications, in-network processing and intelligence for heterogeneous wireless sensor and communication networks, machine learning and deep learning for autonomous systems, data analytics, energy harvesting based smart electronic systems, smart water networks and inference methods for timely detection and prediction of events, cognitive control and adaptive learning in autonomous cyber-physical systems.
The key objectives of the INCAPS project are the following: I). Strengthening collaborative network between industry (both public and private enterprises, small and medium-sized enterprises, and multi-national companies) and academia. II). Increased value creation and enhanced innovation by using smart sensing, machine, and deep learning techniques in autonomous cyber-physical systems. III). Facilitate education and knowledge sharing through better mobility for students and researchers. IV). Create an arena for the generation of research and innovation projects. V). Increased utilization of research and educational infrastructure both in Norway and India. VI). Integrate professionals from industries and academics through workshops, seminars, webinars, and summer/winter schools.