Jose Amendola, Aveen Dayal, Linga Reddy Cenkeramaddi, and Ajit Jha, “Edge-distributed fusion of camera-LiDAR for robust moving object localization” has been accepted for publication in IEEE Access (2023).
The article titled, “Time-frequency Analysis and Fault Prediction of Motor Bearings using Millimeter Wave Radar,” has been accepted for publication in the IEEE Sensors Journal (2023).
Gianluca Salata, Linga Reddy Cenkeramaddi, Van Khang Huynh, Kjell Gunnar Robbersmyr, and Ajit Jha, “Time-frequency Analysis and Fault Prediction of Motor Bearings using Millimeter Wave Radar,” has been accepted for publication in the IEEE Sensors Journal (2023).
The article titled, “Autonomous UAV Path Planning using Modified PSO for UAV-Assisted Wireless Networks” has been accepted for publication in IEEE Access (2023).
Amala Sonny, Sreenivasa Reddy Yeduri, and Linga Reddy Cenkeramaddi, “Autonomous UAV Path Planning using Modified PSO for UAV-Assisted Wireless Networks” has been accepted for publication in IEEE Access (2023).
Two articles are accepted at the 15th Edition INTERNATIONAL CONFERENCE on Electronics, Computers and Artificial Intelligence 29 June – 30 June 2023.
P N Sivaranjini, M Sabarimalai Manikandan, and Linga Reddy Cenkeramaddi, “Fast Quality-Aware AMDF Based Pulse Rate Estimation from Compressed PPG Measurements for Wearable Vital Signs Monitor,” has been accepted for publication in the 15th Edition INTERNATIONAL CONFERENCE on Electronics, Computers and Artificial Intelligence 29 June – 30 June 2023.
Jomole Varghese V, M. Sabarimalai Manikandan and Linga Reddy Cenkeramaddi, “Compressed ECG Sensing Based Fast/Slow HR and Regular/Irregular Rhythm Recognition for Resource-Constrained Health Monitoring Devices,” has been accepted for publication in the 15th Edition INTERNATIONAL CONFERENCE on Electronics, Computers and Artificial Intelligence29 June – 30 June 2023.
The article titled, “Exchange Vanishing Adversarial Attack on LiDAR Point Clouds in Autonomous Vehicles,” has been accepted for publication in the IEEE Transactions on Geoscience and Remote Sensing (TGRS) 2023.
Chalavadi Vishnu, Jayesh Khandelwal, C. Krishna Mohan, and Cenkeramaddi Linga Reddy, “Exchange Vanishing Adversarial Attack on LiDAR Point Clouds in Autonomous Vehicles,” has been accepted for publication in the IEEE Transactions on Geoscience and Remote Sensing (TGRS) 2023.
The article titled, “Detection of Depression using Weighted Spectral Graph Clustering with EEG Biomarkers,” has been accepted for publication in IEEE Access (2023).
Shreeya Garg, Urvashi Prakash Shukla, and Linga Reddy Cenkeramaddi, “Detection of Depression using Weighted Spectral Graph Clustering with EEG Biomarkers,” has been accepted for publication in IEEE Access (2023).
The article titled, “DepCap: A Smart Healthcare Framework for EEG based Depression Detection using Time-Frequency Response and Deep Neural Network,” has been accepted for publication in IEEE Access Journal (2023).
Geetanjali Sharma, Amit M. Joshi, Richa Gupta, and Linga Reddy Cenkeramaddi, “DepCap: A Smart Healthcare Framework for EEG based Depression Detection using Time-Frequency Response and Deep Neural Network,” has been accepted for publication in IEEE Access Journal (2023).
The article titled, “Unified Quality-Aware Compression and Pulse-Respiration Rates Estimation Framework for Reducing Energy Consumption and False Alarms of Wearable PPG Monitoring Devices” has been accepted for publication in IEEE Access (2023).
GANGIREDDY NARENDRA KUMAR REDDY, M. SABARIMALAI MANIKANDAN, N V L NARASIMHA MURTY, AND LINGA REDDY CENKERAMADDI, “Unified Quality-Aware Compression and Pulse-Respiration Rates Estimation Framework for Reducing Energy Consumption and False Alarms of Wearable PPG Monitoring Devices” has been accepted for publication in IEEE Access (2023).
The article titled, Hardware Acceleration of a CNN-based Automatic Modulation Classifier has been accepted for publication in the 2023 Southern Conference on Programmable Logic- SPL2023.
Sravanth Chebrolu, Srinivas Boppu and Linga Reddy Cenkeramaddi, “Hardware Acceleration of a CNN-based Automatic Modulation Classifier,” has been accepted for publication in the 2023 Southern Conference on Programmable Logic- SPL2023.
Abstract: Automatic modulation classification (AMC) has found its place in numerous applications, ranging from cognitive radio and adaptive communication to electronic reconnaissance and spectrum interference detection. Several attempts have been made to develop a high-accuracy modulation classifier using machine learning based convolutional neural networks (CNNs). This paper considers one such model, which uses a fixed boundary range empirical wavelet transform and deep CNN, and accelerates the model on the ZCU104 FPGA board to achieve fast classification times. The proposed accelerator can achieve a maximum classification accuracy of 96% for +8 dB signal-to-noise ratio (SNR) radio signals. Compared to similar works, the accelerator performs reasonably well for low SNR ratios (≤ +6 dB). Furthermore, the model is implemented on an edge CPU device (Raspberry Pi), and our accelerator is 50× faster than the CPU implementation. Our design achieves a reasonable throughput of 1.8K classifications/sec and a classification time of 550 µs per sample.
Keywords: Modulation Classification, Hardware Acceleration, Deep Learning, Convolutional Neural Networks, Vitis AI
The article titled, “Adversarial Unsupervised Domain Adaptation for Hand Gesture Recognition using Thermal Images,” has been accepted for publication in the IEEE Sensors Journal (2023).
Aveen Dayal, Aishwarya M., Abhilash S., C. Krishna Mohan, Abhinav Kumar, Linga Reddy Cenkeramaddi, “Adversarial Unsupervised Domain Adaptation for Hand Gesture Recognition using Thermal Images,” has been accepted for publication in the IEEE Sensors Journal (2023).
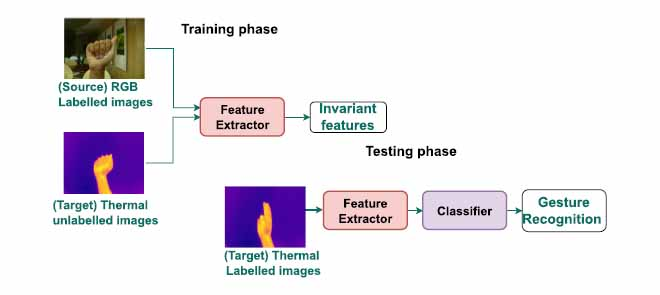
Abstract: Hand gesture recognition has a wide range of applications, including in the automotive and industrial sectors, health assistive systems, authentication, and so on. Thermal images are more resistant to environmental changes than red–green–blue (RGB) images for hand gesture recognition. However, one disadvantage of using thermal images for the aforementioned task is the scarcity of labeled thermal datasets. To tackle this problem, we propose a method that combines unsupervised domain adaptation (UDA) techniques with deep-learning (DL) technology to remove the need for labeled data in the learning process. There are several types and methods for implementing UDA, with adversarial UDA being one of the most common. In this article, the first time in this field, we propose a novel adversarial UDA model that uses channel attention and bottleneck layers to learn domain-invariant features across RGB and thermal domains. Thus, the proposed model leverages the information from the labeled RGB data to solve the hand gesture recognition task using thermal images. We evaluate the proposed model on two hand gesture datasets, namely, Sign Digit Classification and Alphabet Gesture Classification, and compare it to other benchmark models in terms of accuracy, model size, and model parameters. Our model outperforms the other state-of-the-art methods on the Sign Digit Classification and Alphabet Gesture Classification datasets and achieves 91.32% and 80.91% target test accuracy, respectively.
DOI: 10.1109/JSEN.2023.3235379
Keywords: Task analysis, Gesture recognition, Adaptation models, Feature extraction, Thermal imaging sensors, Thermal imaging camera, Data models, Training